61.Электрические машины переменного тока, принцип действия
Принцип действия синхронного генератора. На электрических станциях применяют трехфазные синхронные генераторы переменного тока высокого и низкого напряжений. Слово синхронный обозначает - одновременный. Это значит, что одновременно и в строгой математической зависимости с изменением оборотов изменяется частота тока Эта зависимость определяется формулойгде п 1 - число оборотов генератора в минуту, f 1 - частота тока генератора (гц), р - число пар полюсов в роторе генератора Синхронный генератор состоит из неподвижной части - статора, в пазах которого помещается трехфазная обмотка переменного тока, и вращающейся части -ротора, который представляет собой электромагнит (рис. 163). Обмотки возбуждения ротора питаются через щетки и кольца постоянным током от возбудителя - машины постоянного тока или какого-нибудь выпрямителя Ротор синхронного генератора, находящийся внутри статора, вращают первичным двигателем, при этом магнитное поле ротора пересекает витки трехфазной обмотки статора и индуктирует в них э. д. с. переменного тока. В некоторых конструкциях синхронных генераторов обмотки полюсов неподвижны и укреплены на станине, а вращается трехфазная обмотка переменного тока, выполняемая в пазах стального цилиндра, набранного из листов электротехнической стали. Переменный ток в этом случае снимают с колец, т. е. скользящим контактом, что является недостатком таких генераторов. Широкого распространения эти типы генераторов но нашли.
У стройство
синхронных генераторов
.
Статор синхронного генератора состоит
из чугунной станины - корпуса,
внутри
которого находится сердечник статора,
собранный из отдельных листов
электротехнической стали, изолированной
между собой лаком или тонкой бумагой.
В пазы сердечника укладывают обмотку
статора из медного изолированного
провода (рис. 164).Роторы синхронных
генераторов бывают двух типов -
явнополюсными и неявнополюсными.
Явнополюсными выполняют роторы синхронных
генераторов с небольшим числом
оборотов, обычно соединяемых с тихоходными
гидротурбинами, и генераторов небольшой
и средней мощности (рис. 165). Роторы
неявнополюсные применяют в генераторах
с
большим числом оборотов (3000 об/мин)
и
большой мощности, обычно соединяемых
на одном валу с паровыми турбинами,
называют эти генераторы турбогенераторами
.
Сердечники полюсов большей частью
изготовляют из литой стали, а башмаки
- иногда из отдельных листов
электротехнической стали. Обмотку
полюсов выполняют из медных изолированных
проводов. Для получения синусоидально
изменяющейся э. д. с. необходимо иметь
синусоидальное распределение магнитной
индукции в воздушном зазоре. Это
достигается неравномерностью воздушного
зазора между наконечником полюса и
сталью статора: по краям полюсов воздушный
зазор больше, чем под серединой полюса
(рис. 167). На вал генератора надевают два
кольца, изолированных от него, к
которым присоединяют выводы обмотки
возбуждения ротора, их называют
контактными кольцами. На контактные
кольца устанавливают щетки, а к щеткам
подводят постоянный ток от возбудителя.
Чаще всего в качестве возбудителя
применяют машину постоянного тока,
которую называют машинным
возбудителем,
а
в последнее время используют для
возбуждения твердые или механические
выпрямители. У большего количества
синхронных машин возбудитель
расположен на одном валу с
генератором (рис. 168), а в последних
конструкциях возбудитель располагают
сверху статора синхронной машины (рис.
169). Отечественной электропромышленностью
выпускаются синхронные генераторы
различной мощности горизонтальные
и вертикальные. Генераторы мощностью
до 400 ква
и
более выпускаются на напряжение 400/230 в
и
начиная с мощности 400 ква
на
напряжение 6300 в.
Горизонтальные генераторы типа СГ (С -
синхронный, Г - генератор) выпускаются
с машинным возбудителем, с возбуждением
от твердых выпрямителей (СГС), с
возбуждением от механических выпрямителей
(СГТ) и другие. Вертикальные гидрогенераторы
типа ВГС (В - вертикальный, Г -
гидрогенератор, С - синхронный)
выпускаются мощностью от 250 до 4800 ква
с
машинными возбудителями. Выпускаются
синхронные генераторы для сопряжения
с дизелями на одном валу типа СГД -
мощностью до 1000 ква
стройство
синхронных генераторов
.
Статор синхронного генератора состоит
из чугунной станины - корпуса,
внутри
которого находится сердечник статора,
собранный из отдельных листов
электротехнической стали, изолированной
между собой лаком или тонкой бумагой.
В пазы сердечника укладывают обмотку
статора из медного изолированного
провода (рис. 164).Роторы синхронных
генераторов бывают двух типов -
явнополюсными и неявнополюсными.
Явнополюсными выполняют роторы синхронных
генераторов с небольшим числом
оборотов, обычно соединяемых с тихоходными
гидротурбинами, и генераторов небольшой
и средней мощности (рис. 165). Роторы
неявнополюсные применяют в генераторах
с
большим числом оборотов (3000 об/мин)
и
большой мощности, обычно соединяемых
на одном валу с паровыми турбинами,
называют эти генераторы турбогенераторами
.
Сердечники полюсов большей частью
изготовляют из литой стали, а башмаки
- иногда из отдельных листов
электротехнической стали. Обмотку
полюсов выполняют из медных изолированных
проводов. Для получения синусоидально
изменяющейся э. д. с. необходимо иметь
синусоидальное распределение магнитной
индукции в воздушном зазоре. Это
достигается неравномерностью воздушного
зазора между наконечником полюса и
сталью статора: по краям полюсов воздушный
зазор больше, чем под серединой полюса
(рис. 167). На вал генератора надевают два
кольца, изолированных от него, к
которым присоединяют выводы обмотки
возбуждения ротора, их называют
контактными кольцами. На контактные
кольца устанавливают щетки, а к щеткам
подводят постоянный ток от возбудителя.
Чаще всего в качестве возбудителя
применяют машину постоянного тока,
которую называют машинным
возбудителем,
а
в последнее время используют для
возбуждения твердые или механические
выпрямители. У большего количества
синхронных машин возбудитель
расположен на одном валу с
генератором (рис. 168), а в последних
конструкциях возбудитель располагают
сверху статора синхронной машины (рис.
169). Отечественной электропромышленностью
выпускаются синхронные генераторы
различной мощности горизонтальные
и вертикальные. Генераторы мощностью
до 400 ква
и
более выпускаются на напряжение 400/230 в
и
начиная с мощности 400 ква
на
напряжение 6300 в.
Горизонтальные генераторы типа СГ (С -
синхронный, Г - генератор) выпускаются
с машинным возбудителем, с возбуждением
от твердых выпрямителей (СГС), с
возбуждением от механических выпрямителей
(СГТ) и другие. Вертикальные гидрогенераторы
типа ВГС (В - вертикальный, Г -
гидрогенератор, С - синхронный)
выпускаются мощностью от 250 до 4800 ква
с
машинными возбудителями. Выпускаются
синхронные генераторы для сопряжения
с дизелями на одном валу типа СГД -
мощностью до 1000 ква
в первом случае получит ускорение, и отдаваемая им на сеть активная мощность увеличится, во втором случае ротор получит замедление, тогда мощность генератора уменьшится. Для изменения реактивной мощности генератора изменяют его возбуждение.
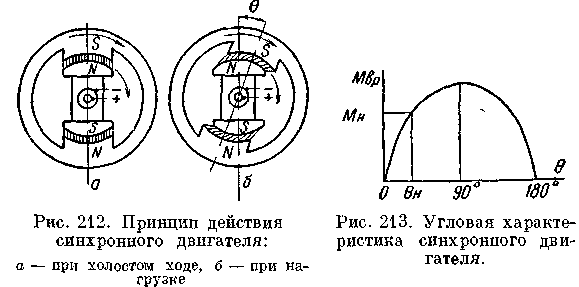
Принцип действия синхронного двигателя . Синхронная машина обратима и может работать как в режиме генератора, так и в режиме двигателя. Конструктивно синхронный двигатель ничем не отличается от синхронного генератора. Принцип действия синхронного двигателя основан на взаимодействии вращающегося магнитного поля статора с магнитным полем полюсов ротора. При работе синхронной машины в режиме двигателя к статору подводят трехфазный переменный ток, а к обмотке возбуждения ротора - постоянный ток. Трехфазный переменный ток создает в обмотке статора вращающееся магнитное поле, которое вращается в пространстве со скоростью
где f - частота переменного тока (гц);
р - число пар полюсов в машине.
Представим себе магнитное поле статора в виде круга с явно выраженными полюсами на нем, вращающегося со скоростью п 1 об/мин. Эти полюса магнитными силовыми линиями связываются с полюсами ротора противоположной полярности (рис. 212). Вращающееся магнитное поле увлекает за собой полюса ротора и заставляет их вращаться с такой же скоростью. Скорость вращения ротора, равную скорости вращающегося магнитного поля, называют синхронной скоростью. При нагрузке ротор синхронного двигателя отстает на некоторый угол в от вращающегося магнитного поля, причем с увеличением нагрузки угол в увеличивается (рис. 212, б Зависимость вращающего момента синхронной машины от угла в представлена на рисунке 213. Кривая имеет вид синусоиды. При поминальной мощности двигателя угол Q = 20-30°, при этом перегрузочная способность двигателя равна-
 Вращающий
момент синхронного двигателя
пропорционален
приложенному
напряжению. Ротор вращается с
синхронной
скоростью, не зависящей
от нагрузки, а при увеличении нагрузки
изменяется только угол в. При
вращении ротора
магнитный поток полюсов
Ф
0
пересекает
витки
обмотки статора и индуктирует в них э.
д. с. Е
0
.
Согласно
уравнению
равновесия э.
д. c.,
приложенное к двигателю
напряжение сети U
с
уравновешивается
суммой обратных э.
д. с. двигателя сумм Е
ДВ
.
На
основании этого уравнения нарисуем
векторную диаграмму синхронного
двигателя (рис. 214). Вектор тока I
откладываем вертикально. Под углом ф в
сторону опережения откладываем вектор
напряжения сети U
c
.
В
фазе с вектором тока откладываем векторы
магнитного потока якоря Ф
я
и
потока рассеяния Ф рс,
каждый из которых индуктирует
соответствующие э. д. с. Е
я
и
Е РС,
отстающие от вектора магнитного потока
на 90°. Откладываем на векторной диаграмме
вектор Е
я
и
пристраиваем к нему вектор э. д. с.
рассеяния E
рс
,
сумма
этих э. д. с. равна падению напряжения
на синхронном индуктивном сопротивлении
двигателя Х сх
Вращающий
момент синхронного двигателя
пропорционален
приложенному
напряжению. Ротор вращается с
синхронной
скоростью, не зависящей
от нагрузки, а при увеличении нагрузки
изменяется только угол в. При
вращении ротора
магнитный поток полюсов
Ф
0
пересекает
витки
обмотки статора и индуктирует в них э.
д. с. Е
0
.
Согласно
уравнению
равновесия э.
д. c.,
приложенное к двигателю
напряжение сети U
с
уравновешивается
суммой обратных э.
д. с. двигателя сумм Е
ДВ
.
На
основании этого уравнения нарисуем
векторную диаграмму синхронного
двигателя (рис. 214). Вектор тока I
откладываем вертикально. Под углом ф в
сторону опережения откладываем вектор
напряжения сети U
c
.
В
фазе с вектором тока откладываем векторы
магнитного потока якоря Ф
я
и
потока рассеяния Ф рс,
каждый из которых индуктирует
соответствующие э. д. с. Е
я
и
Е РС,
отстающие от вектора магнитного потока
на 90°. Откладываем на векторной диаграмме
вектор Е
я
и
пристраиваем к нему вектор э. д. с.
рассеяния E
рс
,
сумма
этих э. д. с. равна падению напряжения
на синхронном индуктивном сопротивлении
двигателя Х сх
поэтому, зная х ох , можно узнать величину суммы векторов Е я + E РС . Так как из уравнения равновесия э. д. с. известно, что напряжение сети U С уравновешивается суммой э. д. с. двигателя, то откладываем вектор ОА, равный и противоположный по направлению вектору напряжения сети U С , который и будет представлять сумму э. д. с. двигателя сумм Е ДВ . Вектор противоэ. д. с. двигателя Е 0 определится как третья сторона треугольника ОАВ, где известны стороны ОА и ОВ. Из этой векторной диаграммы видно, что
В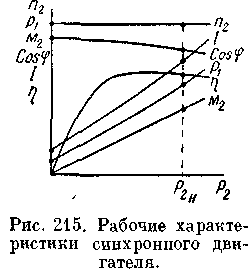 ектор
напряжения сетиU
c
изобразим
состоящим из двух составляющих, каждая
из которых уравновешивает соответствующую
обратную э. д. с. В данном случае
составляющая - Е
0
уравновешивает
э. д. с. Е
0
,
а
составляющая I
х
сх
уравновешивает
э. д. с. Е
я
и
Е
рс
.
ектор
напряжения сетиU
c
изобразим
состоящим из двух составляющих, каждая
из которых уравновешивает соответствующую
обратную э. д. с. В данном случае
составляющая - Е
0
уравновешивает
э. д. с. Е
0
,
а
составляющая I
х
сх
уравновешивает
э. д. с. Е
я
и
Е
рс
.
Рабочие характеристики синхронного двигателя . Рабочими характеристиками синхронного двигателя называют зависимость оборотов п 2 , тока статора I , подведенной мощности P 1 полезного вращающего момента М 2 , cos фи к. п. д. т] от полезной мощности на валу двигателя Р 2 при постоянных напряжении сети U C , частоте сети f и токе возбуждения i в (рис. 215).Так как скорость вращения ротора п 2 не зависит от нагрузки и равна скорости вращающегося магнитного.
Принцип действия асинхронного двигателя . Асинхронный трехфазный двигатель - самый распространенный в промышленности и сельском хозяйстве. Около 95% всех двигателей - асинхронные.
Асинхронный
двигатель изобретен талантливым русским
ученым М. О. Доливо-Добровольским в 1889
г. Простота устройства, дешевизна,
высокий к. п. д., большая надежность
в работе способствовали его быстрому
внедрению во все отрасли хозяйства.
 Принцип
действия асинхронного двигателя
основан на взаимодействии вращающегося
магнитного поля, создаваемого в
трехфазной обмотке статора, и проводников
с током, из которых состоит обмотка
ротора. Скорость вращения поля определяют
из формулы (58)
Представим
себе вращающееся магнитное поле в виде
кольца
с двумя постоянными магнитами (рис.
221). В
середине кольца помещена обмотка ротора
в виде короткозамкнутой
беличьей клетки. Вращающееся-магнитное
поле статора индуктирует в проводах
обмотки ротора токи, направление которых
определяют по правилу правой руки. При
этом нужно иметь в виду, что если магнитное
поле вращается по часовой стрелке,
то относительное вращение проводника
нужно принимать против часовой стрелки.В
проводах, находящихся под северным
полюсом, ток направлен
к нам и направление его обозначим
точкой.При взаимодействии магнитного
поля статора и ротора (рис. 221) к проводу
приложена сила F
,
заставляющая его перемещаться в сторону
движения поля статора.Если
поле статора вращается со скоростью
n 1;
которую называют
синхронной,
то
ротор вращается с меньшей скоростью
n 2
которую называют асинхронной.
Отставание
ротора от поля статора называют
скольжением
и
обозначают буквой s
.
Величина
скольжения может быть определена из
уравнения
Принцип
действия асинхронного двигателя
основан на взаимодействии вращающегося
магнитного поля, создаваемого в
трехфазной обмотке статора, и проводников
с током, из которых состоит обмотка
ротора. Скорость вращения поля определяют
из формулы (58)
Представим
себе вращающееся магнитное поле в виде
кольца
с двумя постоянными магнитами (рис.
221). В
середине кольца помещена обмотка ротора
в виде короткозамкнутой
беличьей клетки. Вращающееся-магнитное
поле статора индуктирует в проводах
обмотки ротора токи, направление которых
определяют по правилу правой руки. При
этом нужно иметь в виду, что если магнитное
поле вращается по часовой стрелке,
то относительное вращение проводника
нужно принимать против часовой стрелки.В
проводах, находящихся под северным
полюсом, ток направлен
к нам и направление его обозначим
точкой.При взаимодействии магнитного
поля статора и ротора (рис. 221) к проводу
приложена сила F
,
заставляющая его перемещаться в сторону
движения поля статора.Если
поле статора вращается со скоростью
n 1;
которую называют
синхронной,
то
ротор вращается с меньшей скоростью
n 2
которую называют асинхронной.
Отставание
ротора от поля статора называют
скольжением
и
обозначают буквой s
.
Величина
скольжения может быть определена из
уравнения
Скольжение - основная переменная величина асинхронной машины, от которой зависит режим ее работы.Из формулы скольжения можно вывести формулу оборотов ротора
Число оборотов ротора п 2 при номинальных нагрузке, напряжении и частоте указывают на заводском щитке двигателя.Величина скольжения асинхронных двигателей составляет примерно s = 0,01- 0,06. Скольжение может быть определено также в процентах.
У асинхронного двигателя при неподвижном роторе скольжение имеет максимальное значение 5=1, так как n2 = 0.В начальный момент пуска в ход асинхронного двигателя, когда n2 еще равно нулю, 5 = 1.
Устройство
асинхронных двигателей.
Асинхронный
двигатель состоит из неподвижной части
- статора
и
вращающейся - ротора.
Статор
представляет собой стальной сердечник
в виде пустотелого цилиндра, набираемого
из отдельных листов
электротехнической
стали, изолированных между собой лаком.
Внутри цилиндра выштампованы пазы, куда
укладывают обмотку статора. По
устройству статор асинхронного
двигателя почти ничем не отличается от
статора синхронной машины. Обмотки
статоров асинхронной и синхронной машин
рассчитывают и выполняют аналогично
(рис. 222).Внутри статора помещается ротор,
представляющий собой стальной цилиндр,
который набирают из отдельных листов
электротехнической стали, покрытых
изоляционным лаком.
Роторы
бывают двух типов: короткозамкнутые
и
фазные.
В
пазы короткозамкнутого ротора укладывают
обмотку в
виде беличьей клетки, выполняемую из
медных стержней, которую с торцовых
сторон замыкают кольцами (рис.223,а).
В
двигателях небольшой мощности, до
100
квт,
беличью
клетку
изготовляют путем заливки пазов ротора
алюминием
под давлением.
Беличью клетку от
стали ротора не изолируют,
так как проводимость
проводников обмотки
в десятки раз больше
проводимости стали. При отливке беличьей
клетки из
алюминия одновременно отливают и боковые
кольца вместе с вентиляционными
крыльями (рис. 224).В
пазы фазного ротора
укладывают трехфазную
обмотку, выполняемую
по типу обмотки
статора. Разрез двигателя с фазным
ротором представлен па рисунке 225.
Как правило, фазную
обмотку ротора
оединяют
в звезду. При этом концы обмотки соединяют
вместе,
а начала присоединяют к контактным
кольцам, на
которые устанавливают щетки, соединенные
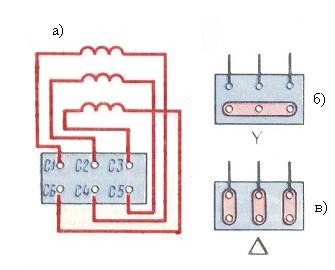
с пусковым реостатом.С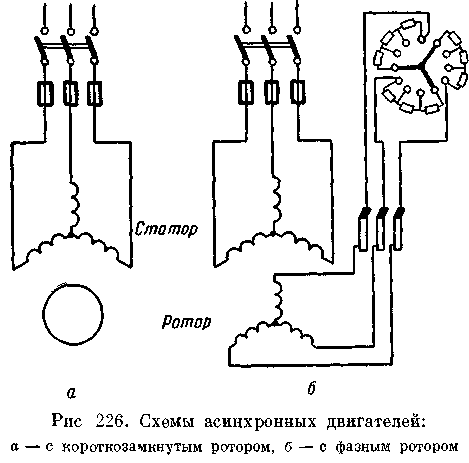 хемы
двигателей приведены на рисунке 226.
Выводы обмоток асинхронных двигателей
обозначают следующим образом:
хемы
двигателей приведены на рисунке 226.
Выводы обмоток асинхронных двигателей
обозначают следующим образом:

Обмотки двигателя могут быть соединены в звезду или в треугольник. Для удобства соединения обмоток в треугольник выводы обмоток присоединены к доске зажимовно схеме, приведенной на рисунке 227, а. На том же рисунке показаны способы и схемы соединения обмоток. Если на паспорте двигателя написано 220/380 в и стоит обозначение треуг/звезда, то это значит, что при линейном напряжении в сети 220 в обмотки нужно соединить в треугольник, а при линейном напряжении 380 в - в звезду. Выводы обмоток ротора обозначают буквами Р 1 Р. 2 Р 3 . В СССР выпускается единая серия асинхронных двигателей А. В нее входят двигатели мощностью от 0,6 до 125 кет. Все двигатели этой серии выполняются с коротко-замкнутой обмоткбй из алюминия. Эти двигатели имеют чугунный корпус, а при малых мощностях корпус отливают из сплава с большим содержанием алюминия, тогда они обозначаются как серия АЛ. Если двигатели имеют закрытую конструкцию с обдувом внешней ребристой поверхности статора при помощи вентилятора, укрепляемого на валу, тогда они обозначаются как серия АО, а при изготовлении корпуса из алюминия - АОЛ.Для замены существующей серии асинхронных электродвигателей А и АО разработана новая единая серия А2
Электрические машины переменного тока. Назначение, область применение, устройство принцип действие машин.
Машины переменного тока бывают двух видов. Это синхронные машины и асинхронные. У синхронных машин скорость вращения ротора строго зависит от частоты переменного тока. Можно сказать скорость вращения "синхронна" с частотой тока. Не трудно догадаться, что у асинхронных машин частота вращения в общем случае зависит от нагрузки на валу, а не от частоты питающего тока. Кроме деления на синхронные и асинхронные электрические машины еще делятся по назначению. Это могут быть генераторы. То есть такая машина, которая преобразует механическую энергию вращения в переменный электрический ток. Машина, которая преобразует электрическую энергию в механическую называется двигателем. Также существует еще один класс электрических машин. Они преобразуют электрическую энергию, тоже в электрическую, но другой частоты или напряжения. Синхронной машиной переменного тока называют такую машину, в которой: основное магнитное поле то есть поле статора создается постоянным током. В частном случае это может быть даже постоянный магнит. А вращение ротора происходит с частотой изменения тока.
Формула 1 - зависимость частоты вращения ротора синхронной машины от частоты переменного тока. где n это частота, с которой вращается ротор, измеряется в оборотах в минуту. То есть, сколько полных оборотов совершит ротор за одну минуту. f частота питающего переменного тока p количество пар полюсов у магнитной системы машины
В настоящее время асинхронные машины используются в основном в режиме двигателя. Машины мощностью больше 0.5 кВт обычно выполняются трёхфазными, а при меньшей мощности – однофазными.
Впервые конструкция трёхфазного асинхронного двигателя была разработана, создана и опробована нашим русским инженером М. О. Доливо-Добровольским в 1889-91 годах. Демонстрация первых двигателей состоялась на Международной электротехнической выставке во Франкфурте на Майне в сентябре 1891 года. На выставке было представлено три трёхфазных двигателя разной мощности. Самый мощный из них имел мощность 1.5 кВт и использовался для приведения во вращение генератора постоянного тока. Конструкция асинхронного двигателя, предложенная Доливо-Добровольским, оказалась очень удачной и является основным видом конструкции этих двигателей до настоящего времени.
За прошедшие годы асинхронные двигатели нашли очень широкое применение в различных отраслях промышленности и сельского хозяйства. Их используют в электроприводе металлорежущих станков, подъёмно-транспортных машин, транспортёров, насосов, вентиляторов. Маломощные двигатели используются в устройствах автоматики.
Широкое применение асинхронных двигателей объясняется их достоинствами по сравнению с другими двигателями: высокая надёжность, возможность работы непосредственно от сети переменного тока, простота обслуживания. Неподвижная часть машины называется статор , подвижная – ротор . Сердечник статора набирается из листовой электротехнической стали и запрессовывается в станину. На рис. 2.1 показан сердечник статора в сборе. Станина (1) выполняется литой, из немагнитного материала. Чаще всего станину выполняют из чугуна или алюминия. На внутренней поверхности листов (2), из которых выполняется сердечник статора, имеются пазы, в которые закладывается трёхфазная обмотка (3). Обмотка статора выполняется в основном из изолированного медного провода круглого или прямоугольного сечения, реже – из алюминия .
Обмотка статора состоит из трёх отдельных частей, называемых фазами . Начала фаз обозначаются буквами c 1 , c 2 , c 3 , концы – c 4 , c 5 , c 6 .
Начала и концы фаз выведены на клеммник , закреплённый на станине. Обмотка статора может быть соединена по схеме звезда или треугольник. Выбор схемы соединения обмотки статора зависит от линейного напряжения сети и паспортных данных двигателя. В паспорте трёхфазного двигателя задаются линейные напряжения сети и схема соединения обмотки статора. Например, 660/380, Y/∆. Данный двигатель можно включать в сеть с U л =660В по схеме звезда или в сеть с U л =380В – по схеме треугольник.
Основное назначение обмотки статора – создание в машине вращающего магнитного поля.
Сердечник ротора набирается из листов электротехнической стали, на внешней стороне которых имеются пазы, в которые закладывается обмотка ротора. Обмотка ротора бывает двух видов: короткозамкнутая и фазная . Соответственно этому асинхронные двигатели бывают с короткозамкнутым ротором и фазным ротором (с контактными кольцами).

Короткозамкнутая обмотка ротора состоит из стержней 3, которые закладываются в пазы сердечника ротора. С торцов эти стержни замыкаются торцевыми кольцами 4. Такая обмотка напоминает “беличье колесо” и называют её типа “беличьей клетки”. Двигатель с короткозамкнутым ротором не имеет подвижных контактов. За счёт этого такие двигатели обладают высокой надёжностью. Обмотка ротора выполняется из меди, алюминия, латуни и других материалов.
Доливо-Добровольский первым создал двигатель с короткозамкнутым ротором и исследовал его свойства. Он выяснил, что у таких двигателей есть очень серьёзный недостаток – ограниченный пусковой момент. Доливо-Добровольский назвал причину этого недостатка – сильно закороченный ротор. Им же была предложена конструкция двигателя с фазным ротором.
Однафазные асинхронные двигатели.
Асинхронный двигатель является простейшей из электрических машин. Как и любая электрическая машина, он имеет две основные части: статор и ротор.
Статор (рис. 6.1) состоит из чугунной станины 1, в которой закреплен магнитопровод 2 в виде полого цилиндра. Между станиной и сердечником обычно оставляют зазор, через который проходит охлаждающий воздух. Для уменьшения потерь на вихревые токи магнитопровод набирают из тонких (0,5 мм) листов электротехнической стали, изолированных друг от друга лаком.

Рис. 6.1 . Конструкция статора асинхронного двигателя:
1 - станина; 2 - сердечник; 3 - обмотка;
4 - лапа; 5 - прокладка
В пазы, вырезанные по внутренней окружности статора, укладывают обмотку 3. У двухполюсной машины обмотка статора состоит из трех катушек, сдвинутых на углы 120°, у четырехполюсной - из шести катушек, сдвинутых на 60°, у шестиполюсной - из девяти катушек и т. д. Обмотку в пазах статора закрепляют клиньями.
Ротор также набирают из тонких листов электротехнической стали. В пазах ротора размещают обмотку, которая может быть короткозамкнутой или фазной (рис. 6 .2 ). Короткозамкнутая обмотка типа

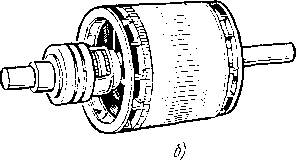
Рис. 6.2 . Общий вид ротора асинхронного двигателя с коротко- замкнутой (а) и фазной (б) обмотками
«беличья клетка» изображена на рис. 6.3 . Она состоит из толстых проводящих стержней (медь, алюминий), соединенных по торцам медными или алюминиевыми кольцами. Короткозамкнутая обмотка не изолируется от ротора. Иногда ее изготовляют заливкой расплавленного алюминия в пазы ротора.
Контактные кольца 1 , изготовленные из латуни или меди, укрепляют на валу двигателя с помощью изолирующих прокладок. Щеткодержатель с угольными или медно-графитовыми щетками 2 крепят на подшипниковом щите.
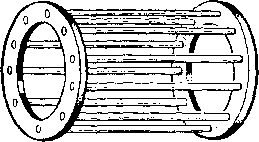
Рис. 6.3 . Общий вид коротко- замкнутой обмотки типа «беличья клетка»

Рис. 6.4 . Схема соединения фазной обмотки ротора с регулировочными реостатами:
1 -"контактные кольца, 2- щетки; 3 - реостаты
Общий вид асинхронного двигателя показан на рис. 6.5 .
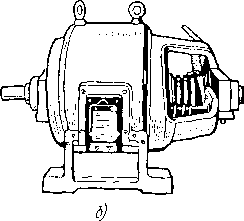

Рис. 6.5 . Общий вид асинхронного двигателя с короткозамкнутой (а) и фазной (б) обмотками ротора
Принцип действия асинхронного двигателя.
Принцип действия асинхронного двигателя основан на использовании вращающегося магнитного поля и основных законов электротехники.
При включении двигателя в сеть трехфазного тока в статоре образуется вращающееся магнитное поле, силовые линии которого пересекают стержни или катушки обмотки роторо. При этом, согласно закону электромагнитной индукции, в обмотке ротора индукциреутся ЭДС , пропорциональная частоте пересечения силовых линий. Под действием индуцированной ЭДС в короткозамкнутом роторе возникают значительные токи.
В соответствии с законом Ампера на проводники с током, находящиеся в магнитном поле, действуют механические силы, которые по принципу Ленца стремятся устранить причину, вызывающую индуцированный ток, т. е. пересечение стержней обмотки ротора силовыми линиями вращающегося поля. Таким образом, возникшие механические силы будут раскручивать ротор в направлении вращения поля, уменьшая скорость пересечения стержней обмотки ротора магнитными силовыми линиями.
Достичь частоты вращения поля в реальных условиях ротор не может, так как тогда стержни его обмотки оказались бы неподвижными относительно магнитных силовых линий и индуцированные токи в обмотке ротора исчезли бы. Поэтому ротор вращается с частотой, меньшей частоты вращения поля, т. е. несинхронно с полем, или асинхронно.
Если силы, тормозящие вращение ротора, невелики, то ротор достигает частоты, близкой к частоте вращения поля. При увеличении механической нагрузки на валу двигателя частота вращения ротора уменьшается, токи в обмотке ротора увеличиваются, что приводит к увеличению вращающего момента двигателя. При некоторой частоте вращения ротора устанавливается равновесие между тормозным и вращающим моментами.
Синхронный двигатель
Устройство статора синхронного двигателя аналогично устройству статора асинхронного двигателя. Ротор синхронного двигателя представляет собой электромагнит или постоянный магнит (рис. 6.6 ).
Принцип работы синхронного двигателя поясняется рис. 6.7 . Внутри магнита N 1 S 1 помещен магнит NS . Если магнит N 1 S 1 вращать, то он потянет за собой магнит NS . В стационарном режиме частоты вращения обоих магнитов одинаковы.
К валу магнита NS можно приложить механическую нагрузку. Чем больше эта нагрузка, тем больше угол отставания оси магнита NS от оси магнита NiSi . При некоторой нагрузке силы притяжения между магнитами будут преодолены и ротор остановится.
В реальном двигателе поле магнита N 1 S 1 заменено вращающимся магнитным полем статора; при этом ротор либо вращается синхронно с магнитным полем статора, отставая на угол, либо останавливается (выпадает из синхронизма) при перегрузке. Таким образом, независимо от нагрузки ротор всегда вращается с постоянной частотой, равной частоте вращения магнитного поля статора:
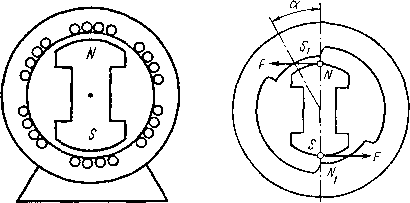
Рис. 6.6. Схематическое изображение Рис. 6.7. К пояснению принципа синхронного двигателя работы синхронного двигателя
Постоянство частоты вращения - важное достоинство синхронного двигателя. Строгое постоянство частоты вращения требуется во многих областях техники, например при записи и воспроизведении звука. Недостаток синхронного двигателя - трудность пуска: для пуска нужно раскрутить ротор в сторону вращения поля статора. Для этого чаще всего применяют специальную короткозамкнутую обмотку, вделанную в ротор. В момент пуска двигатель работает как асинхронный. Когда частота вращения ротора приближается к частоте вращения поля статора, ротор входит в синхронизм и двигатель работает как синхронный. Короткозамкнутая обмотка при этом оказывается обесточенной, так как частота вращения ротора равна частоте вращения поля статора и стержни обмотки ротора не пересекаются магнитными силовыми линиями.
В настоящее время существует тенденция замены на подвижных объектах (корабли, самолеты, автомобили) электрических цепей постоянного тока цепями переменного тока повышенной частоты (200, 400 Гц и выше). Возможность использования бесколлекторных машин переменного тока, трансформаторов и магнитных усилителей позволяет повысить надежность работы цепи, а также уменьшить габариты и массу машин и аппаратов.
При оборудовании объекта сетью переменного тока широкое применение находит электропривод на переменном токе. Разработаны схемы с асинхронными и синхронными двигателями, которые позволяют выполнить все операции, осуществляемые ранее двигателями постоянного тока.
Преимущества асинхронных двигателей особенно заметны тогда, когда по условиям работы привода нет необходимости в плавном регулировании частоты вращения в широких пределах и больших пусковых моментах (привод насосов, вентиляторов и др.).
Синхронные двигатели особенно удобны для привода роторов гироскопов. В тех случаях, когда гироскоп используют для особо точных измерений (например, в баллистических ракетах), приводом ротора гироскопа служит синхронный двигатель. При этом частота вращения ротора зависит только от конструкции двигателя и частоты питающего тока, которую можно стабилизировать с очень высокой степенью точности.
Синхронный генератор
Ротор синхронных машин вращается синхронно с вращающимся магнитным полем (отсюда их назва н ие). Поскольку частоты вращения ротора и магнитного п ол я одинаковы, в обмотке ротора не индуцируются токи. Поэтому обмотка ротора получает питание от источника постоянного тока.
Устройство статора синхронной машины (рис. 6.8) практически не отличается от устройства статора асинхронной машины.
Рис 6.8 . Общий вид статора синхронного генератора.
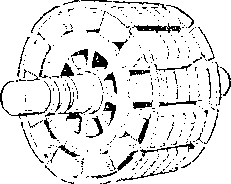
Рис 6.9 . Общий вид неявнополюсного ротора синхронного генератора.
Роторы синхронных генераторов могут быть явнополюсными (рис. 6.9) и неявнополюсными (рис. 6.10). В первом случае синхронные генераторы приводятся в действие тихоходными турбинами гидроэлектростанций, во втором - паровыми или газовыми турбинами теплоэлектростанций.

Рис. 6.10. Общий вид неявнополюсного ротора синхронного генератора
Используют различные способы возбуждения синхронных генераторов. Широкое распространение получил синхронный генератор с машинным возбудителем, представляющим собой генератор постоянного тока, расположенный на одном валу с синхронным генератором. Машинный возбудитель приводится в действие от того же первичного двигателя, что и синхронный генератор. Выходные зажимы возбудителя через щетки и кольца подсоединены к обмотке ротора синхронного генератора. Напряжение синхронного генератора можно регулировать реостатом в цепи обмотки возбуждения возбудителя, что удобно и энергетически выгодно, так как в этой обмотке протекают сравнительно небольшие токи.
Находят также применение генераторы с самовозбуждением через полупроводниковые или механические выпрямители.
Из характеристик синхронного генератора наибольший практический интерес представляют внешние характеристики, выражающие зависимость напряжения на зажимах генератора от тока нагрузки при неизменных значениях тока возбуждения, частоты и коэффициента мощности.
Электрические машины, как и другие устройства, также можно классифицировать. Классифицируют электрические машины по назначению, принципу действия и роду тока, мощности, по частоте вращения.
Классификация по назначению
Электрические машины по своему назначению подразделяют на:
- Электромашинные генераторы. Они выполняют преобразовании энергии механической (вращение) в электрическую. Они устанавливаются на электрических станциях, автомобилях, самолетах, тепловозах, передвижных электростанциях, кораблях и в других установках. На приводят в движение мощные паровые турбины, на автомобилях, тепловозах и прочих транспортных средствах – газовые турбины или двигатели внутреннего сгорания. Генераторы очень часто используют в качестве источников питания в различных установках связи, автоматики и измерительной техники и в других системах.
- Электрические двигатели – выполняют функции обратные генератору, а именно, преобразуют электрическую энергию в механическую. Они используются для приведения в движение множества установок в промышленности, сельском хозяйстве, транспорте, в быту, в системах связи. В их активно используют в качестве регулирующих, программирующих и исполнительных органов.
- Электромашинные преобразователи – выполняют преобразования электрических величин. Например, могут преобразовывать постоянный ток в переменный и наоборот, изменять частоту, число фаз и другие функции. В связи с активным внедрением полупроводниковых преобразователей электромашинные преобразователи в новых проектах используют крайне редко (практически никогда), а уже установленные электромашинные преобразователи активно модернизируются полупроводниковыми (тиристорными и транзисторными).
- – осуществляют регулирование коэффициента мощности cos φ, а именно баланса реактивной мощности в сети.
- Электромашинные усилители – используют для объектов большой мощности. Это, своего рода усилители, они усиливают сигналы большой мощности, при этом управление ведется сигналами малой мощности. Роль этих усилителей, как и электромашинных компенсаторов, в современном мире практически сведена на нет из – за применения полупроводниковых усилителей (транзисторных и тиристорных).
- Электромеханические преобразователи сигналов – это, как правило, электрические микромашины (например, сельсины), которые довольно широко используют в системах автоматического управления.
Классификация по роду тока и принципу действия
Как известно, существует два рода электрического тока – переменный и постоянный. Исходя из этого, электрические машины также подразделяют по роду тока на два вида –машины электрические переменного тока и машины электрические постоянного тока.
Электрические машины переменного тока
В свою очередь электрические машины переменного тока делят на:
- Трансформаторы – наиболее широко применимы в сетях электроснабжения для преобразования напряжений (повышение и понижение). Также довольно широко их применяют в выпрямительных установках для согласования напряжений, в устройствах связи, вычислительной техники и автоматики. Часто применяются и для проведения измерений электрических (измерительные трансформаторы), а также для различных функциональных преобразований (трансформаторы вращающиеся).

- Асинхронные электродвигатели – самые распространенные в мире благодаря своей относительной простоте и низкой стоимости. Простота конструкции и высокая надежность позволяет применять их не только в промышленных электроустановках (станки, краны, подъемные машины), но и в бытовых (компрессора холодильников, вентиляторы, пылесосы). Довольно широкое применение получили однофазные и двухфазные асинхронные управляемые электродвигатели, а также сельсины и тахогенераторы асинхронные.

- Синхронные электродвигатели – наиболее часто применяемы в качестве генераторов электрического тока на электрических станциях. Также применимы в качестве генераторов повышенной частоты в различных источниках питания (например, на кораблях, тепловозах, самолетах). Также в электроприводах большой мощности применяют синхронные электродвигатели, которые могут также помимо выполнения полезной работы и также влиять на коэффициент мощности сети cos φ. Относительно электроприводов малой мощности, то там довольно широкое распространение получили реактивные синхронные электродвигатели, шаговые, индукторные, с постоянными магнитами и другие.
- – используют их относительно редко и зачастую только в качестве электродвигателей. Это вызвано сложностью их конструкции, а также в необходимости довольно тщательного ухода за ними. В бытовых электроприборах и устройствах автоматики применяются универсальные коллекторные электродвигатели, способные работать на двух родах тока – постоянном и переменном.
Электрические машины постоянного тока
В недалеком прошлом были они самыми популярными в регулируемом электроприводе из-за простоты управления ими. Они работают практически во всех сферах промышленности и транспорта. Из-за повышенной стоимости и требовательности в обслуживании активно вытесняются частотно-регулируемыми электроприводами переменного тока.
В связи с большим распространением машин постоянного тока также были распространены и генераторы постоянного тока. Они использовались в качестве источников постоянного напряжения для зарядки аккумуляторных батарей, на транспорте (тепловозы, теплоходы и другие), а также в промышленности (). Ввиду развития полупроводниковой техники генераторы постоянного тока постепенно вытесняются из работы и активно заменяются на генераторы переменного тока работающих в паре с полупроводниковым преобразователем.
Также применяются электродвигатели постоянного тока и в системах автоматического управления АСУ в качестве усилителей электромашинных, тахогенераторов и исполнительных электродвигателей.
Электрические микромашины
Микромашины активно применяются в устройствах автоматических. Соответственно их подразделяют на группы:
- Силовые микродвигатели – приводят во вращения механизмы различных автоматических устройств. Например, самопишущие устройства и другие.

- Исполнительные (управляемые) микромашины – выполняют преобразование энергии электрической в механическую, то есть ведут обработку определенных команд из вне.
- Тахогенераторы – преобразуют механическую энергию вращения вала в электрический сигнал напряжения, который пропорционален скорости вращения вала.
- Вращающиеся трансформаторы – на выходе этих трансформаторов устанавливается напряжение, пропорциональное функции углу поворота ротора, например синусу или косинусу данного угла или же самому углу.
- Машины синхронной связи – (магнесины или сельсины) осуществляют синфазный и синхронный поворот или же вращения нескольких осей, не имеющих между собой механической связи.
- Микромашины гироскопических приборов – вращают роторы гироскопов с довольно высокой частотой, а также производят коррекцию их положения.
- Электромашинные усилители и преобразователи.
Машины первых двух групп довольно часто называют силовыми, а электродвигатели третьей – пятой групп информационными.
Классификация по мощности
Также электрические машины классифицируют еще и по мощности. И по мощности их делят на:
- Микромашины – их мощность может варьироваться от нескольких долей ватта до 500 Вт. Они могут производится для двух родов тока — постоянного и переменного. Могут быть рассчитаны как на работу при нормальной (промышленной) частоте 50 Гц, так и при повышенной (от 400 до 2000 Гц).
- Электродвигатели малой мощности – от 0,5 до 10 кВт. Также могут изготавливаться для двух родов тока – постоянного и переменного нормальной и повышенной частоты.
- Электродвигатели средней мощности – от 10 кВт до нескольких сотен ватт.
- Электродвигатели большой мощности – мощность данных машин больше нескольких сотен киловатт. Такие электродвигатели предназначены для работы на постоянном и переменном напряжении нормальной частоты. Исключение могут составлять электродвигатели специального назначения (авиация, флот) и другие.

Классификация по частоте вращения
Условно их разделяют на:
- До 300 об/мин — тихоходные.
- От 300 до 1500 об/мин — средней быстроходности.
- От 1500 до 6000 об/мин — быстроходные.
- Более 6000 об/мин — сверхбыстроходные.
Микромашины же могут изготавливать с частотой вращения вала от нескольких оборотов в минуту до 60 000 оборотов в минуту. Скорость вращения машин средней и большой мощности, как правило, не превышает 3000 об/мин.
Электрическая машина имеет статор и ротор, разделенные воздушным зазором (рис. 3.1). Активными частями ее являются магнитопровод и обмотки. Все остальные части - конструктивные, обеспечивающие необходимую жесткость, прочность, возможность вращения, охлаждения и т. п.
Магнитопровод машины, по которому замыкается переменный магнитный поток, выполняют шихтованным - из листов электротехнической стали, как и у трансформатора. Если поток постоянный, то магнитопровод можно выполнять массивным; в этом случае он может осуществлять и конструктивные функции, т. е. служить элементом, обеспечивающим прочность данной части машины (статора или ротора).
Так как в частях электрических машин магнитный поток замыкается по сложным контурам, отличным от прямолинейных, в них, как правило, применяется изотронная холоднокатаная сталь. Только для изготовления полюсов синхронных машин и крупных машин постоянного тока иногда применяется анизотропная холоднокатаная сталь, так как в полюсах направление магнитных линий совпадает с направлением прокатки, в котором магнитная проницаемость очень велика. Сердечники статоров и роторов асинхронных машин и якорей синхронных машин постоянного тока штампуют из изотронной рулонной холоднокатной стали, позволяющей при раскрое получать экономию порядка 10-15% по сравнению с листовой, вследствие чего листовая сталь применяется очень редко.
В машинах малой мощности применяется сталь марки 2013, с низким содержанием кремния, достаточно вязкая, которая и позволяет получать мелкие пазы сложной конфигурации. В машинах средней и большой мощности применяют сталь марки 2212, 2311 и 2411, с повышенным содержанием кремния. Эти стали более хрупки, что затрудняет их штамповку, но имеют низкие потери на перемагничивание и не требуют отжига сердечников после штамповки.
В микромашинах широко применяют также магнитопроводы, собранные из листов железоникелевых сплавов типа пермаллой.
Статор асинхронных и большинства синхронных машин состоит из шихтованного магнитопровода (рис. 3.2, а ), который запрессовывают в литую станину (рис. 3.2,6 ). Поскольку через массивную станину переменный магнитный поток не замыкается, станину можно выполнять из немагнитного материала (алюминия) или ферромагнитного с малой магнитной проницаемостью (чугуна), сравнительно дешевых и хорошо приспособленных к литейной технологии. На внутренней поверхности шихтованного статора, в пазах, располагают обмотку статора.
Ротор асинхронной машины (рис. 3.2, в ) обычно состоит из сердечника, набранного из листов электротехнической стали. Сердечник запрессовывают на вал или втулку ротора (при больших размерах машины) и сжимают специальными нажимными шайбами. В пазах, размещенных на наружной поверхности ротора (сходных по форме с пазами статора), располагают обмотку ротора. В синхронных машинах ротор выполняют массивным, так как на нем расположены полюсы с обмотками возбуждения, магнитный поток которых неподвижен относительно ротора. При изготовлении листов ротора и статора в них штампуют пазы (рис. 3.3, а и б ) для укладки проводников обмотки ротора и статора, а также вентиляционные каналы для прохода охлаждающего воздуха.
Конфигурация зубцов и пазов (рис. 3.4 и 3.5) зависит от типа машины и ее мощности. В машинах большой мощности обмотки статора и ротора выполняют из проводников прямоугольного сечения; в этом случае применяют открытые пазы прямоугольной формы, позволяющие наилучшим образом разместить проводники и обеспечить надежную их изоляцию. В машинах малой и средней мощности обмотки ротора и статора обычно выполняют из провода круглого сечения; в таких машинах применяют полузакрытые пазы овальной или трапецеидальной формы. В ряде случаев при проводниках прямоугольного сечения применяют полуоткрытые пазы, уменьшающие магнитное сопротивление слоя «зубцы - пазы -воздушный зазор» по сравнению с открытыми пазами. В микромашинах роторы часто имеют пазы круглой формы; при этом существенно упрощается и удешевляется изготовление штампов.
При укладке проводников в пазы дно и стенки покрывают изоляционным материалом (электрокартоном, лакотканью, миканитом и пр.). Проводники, а также их верхний и нижний слои тоже изолируют друг от друга. Чем выше напряжение, при котором работает машина, тем большую электрическую прочность должна иметь изоляция проводников от сердечника ротора или статора. Проводники укрепляют в пазах ротора и статора с помощью клиньев, а на роторе, кроме того, с помощью проволочных бандажей или стеклобандажей, которые наматывают на лобовые части его обмотки (части обмотки, выходящие из сердечника ротора). В некоторых случаях бандажи располагают и в нескольких местах вдоль сердечника ротора.
Для подвода тока к обмотке ротора или подключения к ней реостата на роторе должны быть расположены контактные кольца: три кольца при трехфазном токе и два кольца при постоянном токе. Исключение составляют асинхронные машины с короткозамкнутым ротором, которым контактные кольца не требуются. Токосъем с контактных колец осуществляют с помощью щеток - прямоугольных брусков, изготовленных из смеси угля, графита и порошка металла (меди и свинца). Щетки устанавливают в специальных щеткодержателях и прижимают к контактной поверхности с помощью пружин. Электрические машины мощностью примерно до 2000 кВт имеют шариковые или роликовые подшипники, которые располагают в подшипниковых щитах. При больших мощностях применяют скользящие подшипники.
Электрические машины переменного тока - асинхронные и синхронные, несмотря на различия в устройстве и конструкции, имеют много общего в принципе работы и теории. В этих машинах при прохождении по обмоткам статора или ротора переменного тока, синусоидально изменяющегося во времени, создается вращающееся магнитное поле. Это поле, в свою очередь, пересекает обмотки статора и ротора (или одну из них) и наводит в них переменную ЭДС. Общность физических процессов обусловливает общность теории и сходность конструкции многофазных обмоток переменного тока и принципов устройства статора асинхронной машины и якоря синхронной машины.
6.1 Общее устройство машин переменного тока
Машинами переменного тока (МПрТ) называются устройства, преобразующие электрическую энергию переменного тока в механическую и наоборот. Как и машины постоянного тока (МПТ), они обладают принципом обратимости и также имеют подвижную и неподвижную части. Подвижная часть назы-вается р о т о р о м, а неподвижная с т а т о ро м.
В отличие от МПТ, в машинах переменного тока наиболее важным узлом является неподвижная часть, т.е. статор (рис.52). Это объясняется тем, что именно в обмотке статора наводится ЭДС. В генераторе она создает напряжение на клеммах машины, а в двигателе определяет величину поступающего тока и и его механические характеристики.
Так же как в якоре МПТ, она размещается в пазах ста-тора. Статор состоит из корпуса (1), сердечника(2) и обмотки(3). Обмотка машин переменного тока является 3-х фазной и это обстоятельство является глав-ной особенностью машин пере-менного тока. Дело в том, что за счет сдвига фаз токов друг относительно друга на 120 0 , и пространственного разнесения катушек в полости статора также на 120 0 , удается создать вращающееся магнитное поле.
Этот факт иллюстрируется на рис.53. На нем представле  ны колебания 3-х токов в катушках А, В, С, пространственное положение которых в статоре отмечено тремя метками на нижних круговых диаграммах. Указанные катушки изображены на окружностях в порядке следования по часовой стрелке вдоль каждой из семи окружностей, символизирующих внутреннюю полость статора. Черная стрелка в каждой окружности изображает суммарное магнитное поле созданное этими катушками. Так, при 0 0 , суммарное магнитное поле направлено вверх, к катушке А (ток в ней положителен). При 60 0 , т.е. спустя некоторое время, наибольший ток - отрицательного знака - возникает в катушке В и суммарное магнитное поле становится направленным от катушки В, которая находится в правой нижней части окружности статора). При 120 0 , наибольшее значение - положительное - приобретает ток в катушке С и суммарное магнитное поле оказывается направленным к катушке С, находящейся в нижней левой части окружности-статора и т.д. Важным моментом в рассматриваемом изменении ориентации магнитного поля является то, что оно остается п о с т о я н н ы м п о м о д у л ю. То есть колебания 3-х токов в обмотках статора приводят к равномерному вращению постоянного по величине магнитного поля в полости статора.
ны колебания 3-х токов в катушках А, В, С, пространственное положение которых в статоре отмечено тремя метками на нижних круговых диаграммах. Указанные катушки изображены на окружностях в порядке следования по часовой стрелке вдоль каждой из семи окружностей, символизирующих внутреннюю полость статора. Черная стрелка в каждой окружности изображает суммарное магнитное поле созданное этими катушками. Так, при 0 0 , суммарное магнитное поле направлено вверх, к катушке А (ток в ней положителен). При 60 0 , т.е. спустя некоторое время, наибольший ток - отрицательного знака - возникает в катушке В и суммарное магнитное поле становится направленным от катушки В, которая находится в правой нижней части окружности статора). При 120 0 , наибольшее значение - положительное - приобретает ток в катушке С и суммарное магнитное поле оказывается направленным к катушке С, находящейся в нижней левой части окружности-статора и т.д. Важным моментом в рассматриваемом изменении ориентации магнитного поля является то, что оно остается п о с т о я н н ы м п о м о д у л ю. То есть колебания 3-х токов в обмотках статора приводят к равномерному вращению постоянного по величине магнитного поля в полости статора.
Получающееся магнитное поле (N-S) совершает один полный оборот за один период колебаний. Как известно, промышленный 3-х фазный ток имеет частоту 50 Гц, - следовательно скорость вращения магнитного поля в полости статора МПрТ составляет 50х60 = 3000 об/мин. В силу обратимости машин переменного тока справеливо и обратное утверждение: для создания трехфазного тока с частотой переменного тока 50 Гц, в машине с 3-мя катушками, скорость вращения магнитного поля (N-S) – т.е. ротора c одной парой полюсов - должна составлять 3000 об/мин. Это значение скорости является максимальным для серийных машин переменного тока, однако не единственно возможным.
Действительно, если вместо 3-х катушек в полости статора разместить 6 катушек в порядке чередования «А-В-С-А-В-С», то за один период колебания тока в каждой фазе вектор индукции суммарного магнитного поля повернется только на 180 0 , а скорость вращения поля снизится до 1500 об/мин. При этом ротор такой машины должен иметь 2 пары полюсов «N-S-N-S», так как по истечению полного периода колебаний тока, и повороте ротора на 180 0 , ориентация полюсов должна приобрести первоначальную конфигурацию. Это возможно только, если одноименные полюса ротора также находятся под углом 180 0 , а разноименные - под углом 90 0 .